















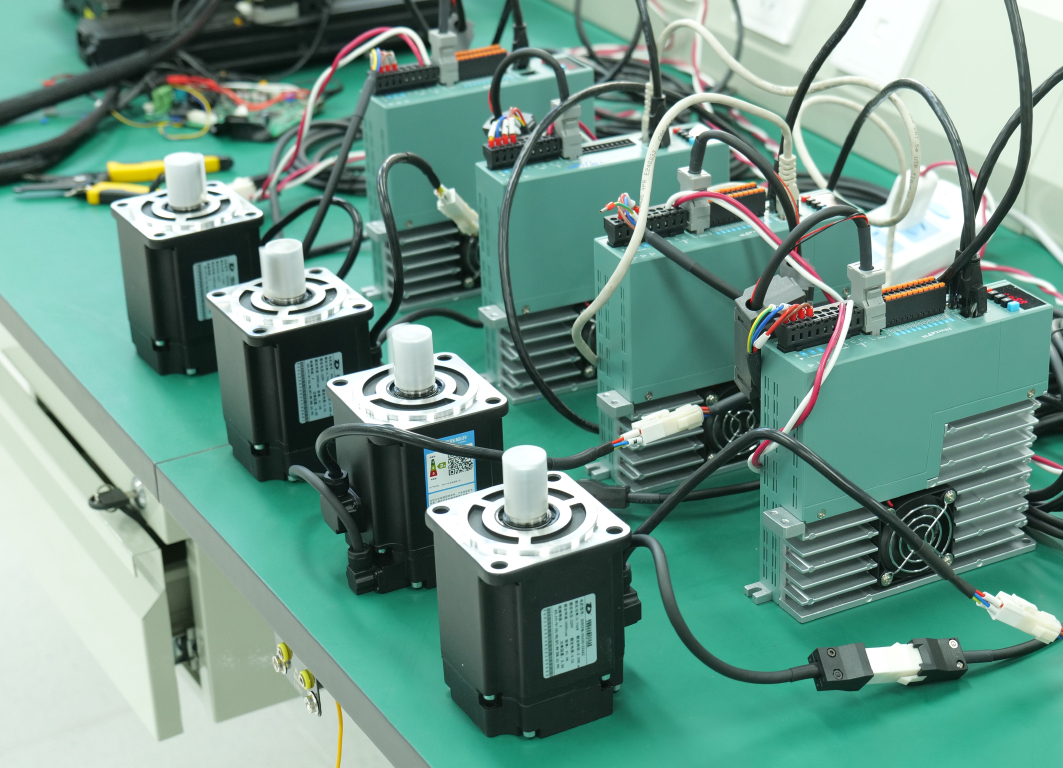
伺服电机、无刷电机选型要素解析,高性能RISC-V电机驱动芯片、方案介绍

其中,无刷电机(Brushless Motor)和伺服电机(Servo Motor)是两种最常见的电机驱动类型,它们在设计、控制和应用方面有一些区别。
直流无刷电机通过接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
伺服电机系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。其中伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机的应用范围为如机床、印刷设备、自动化生产线等对工艺精度、加工效率和工作可靠性等要求相对较高的设备。
以下是它们之间的主要区别:
伺服电机包括一个电机、一个编码器和一个控制器组成。编码器给出反馈信号,控制器接收反馈信号并控制电机转速、方向和位置。控制器可以直接编程,以便更好更精确地控制电机。
而直流无刷电机只包括一个无刷电机和一个控制器。控制器接收输入信号并控制电机旋转、停止和反转。
因此,伺服电机具有更完整的闭环控制能力,可以更准确地定位。
二、工作原理的不同
无刷直流电机的工作原理与传统的直流电机相同,都是使用直流电磁场相互作用的原理来实现电机的运转。但是,与传统的直流电机不同的是,无刷直流电机采用永磁体作为转子,使用电子控制器改变转子上的磁场方向,从而控制电机的运转速度和方向。
伺服电机的工作原理则是通过接受外部控制器发出的电脉冲信号来改变电机的位置和转速。控制器会将电脉冲信号传输给电机,控制电机的转子转动一定的角度,以使电机的输出角度精确控制在给定范围内。
三、控制方式的不同
伺服电机和直流无刷电机都非常容易控制,但是伺服电机可以更好地控制电机的位置和速度。因为伺服电机有反馈机制,可以在很短时间内调整电机的位置和速度,以达到更精确的控制。伺服电机可以在工作过程中实现高速、高加速度和高精度的运动。
而采用开环控制的直流无刷电机可以通过直接改变电源电压和电流来实现速度和方向的控制,也可以使用电子控制器来调节电机的转速,这可能导致其在位置控制方面不如伺服电机精确。尽管可以进行反馈控制,但精确性和控制能力有限于闭环控制。
四、性能特点不同
直流无刷电机:可靠性高,稳定性好,适应性强,维修与保养简单;耐颠簸震动,噪音低,震动小,运转平滑,寿命长;不产生火花,特别适合爆炸性场所,有防爆型;根据需要可选梯形波磁场电机和正弦波磁场电机。
交流伺服电机:无电刷和换向器,因此工作可靠,对维护和保养要求低。定子绕组散热比较方便。惯量小,易于提高系统的快速性。适应于高速大力矩工作状态。
五、应用场景不同
无刷直流电机适用于需要高速转动、需要力矩平稳控制、精度要求相对较低的场合。如自行车、电动工具、家用电器等。
伺服电机则适用于要求高精度、高速度和高度控制精度的应用场合。如工业机械臂、数控机床、机器人、服装机械、印刷设备、模具加工、飞行器、航天器等。
总的来说,无刷直流电机和伺服电机在机械制造、自动化控制等领域有着广泛的应用。无刷直流电机可以简单地通过改变电压和电流来控制,但伺服电机需要专门的控制器进行控制。在选择电机时应根据应用场景的要求选择合适的电机,以实现更好的性能和控制。
作为国内领先的高性能MCU研发企业,先楫半导体芯片产品可应用于工业自动化中的编码器和伺服驱动器领域,先楫HPM6000系列芯片产品采用全新的RISC-V芯片系统架构定义、全新CPU内核、大量自主创新的IP设计,以及完整的配套生态,打造出了高性能的国产MCU系列,使我们的客户可以在不必增加成本和功耗的前提下,满足更高效的工业控制,更丰富的显示功能和更强大的数据处理要求。
下列为先楫半导体在电机驱动领域的一些主控芯片与方案:
HPM5300
HPM5300是先楫半导体面向工业自动化、新能源及汽车电子三大应用领域推出的一款高性能运动控制微控制器产品。
HPM5300 支持双精度浮点运算及强大的 DSP 扩展,主频 480MHz,达到甚至超越国际主流高性能 MCU 产品,满足大多数应用场景下的开发需求。
目前,HPM5300系列产品已经广泛应用于工业自动化中的编码器和伺服驱动器,新能源中的微型逆变器,汽车电子中的 IMU、ECU 和汽车座椅门控模块等产业中。
HPM6700/6400
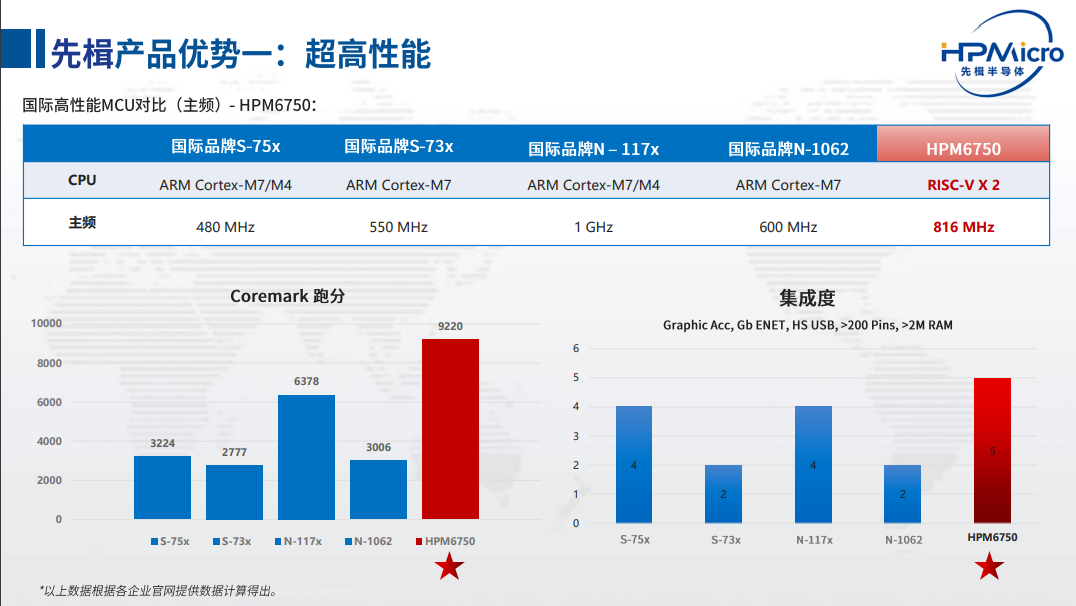
先楫主打产品HPM6700/6400系列不仅拥有816MHz的主频、还有LCD驱动、2D图形加速、JPEG解码、音频输入等多媒体外设,具备17个串口、双千兆以太网等通讯外设,还具备4组电机控制模块,能输出32路PWM输出、接4个编码器,可以完成单芯片驱动4个电机。可以实现LCD显示、音频信号处理、数据转发透传、电机控制等功能,主要应用于工业自动化、电机控制、电源管理、物联网等领域。
磁编码器方案
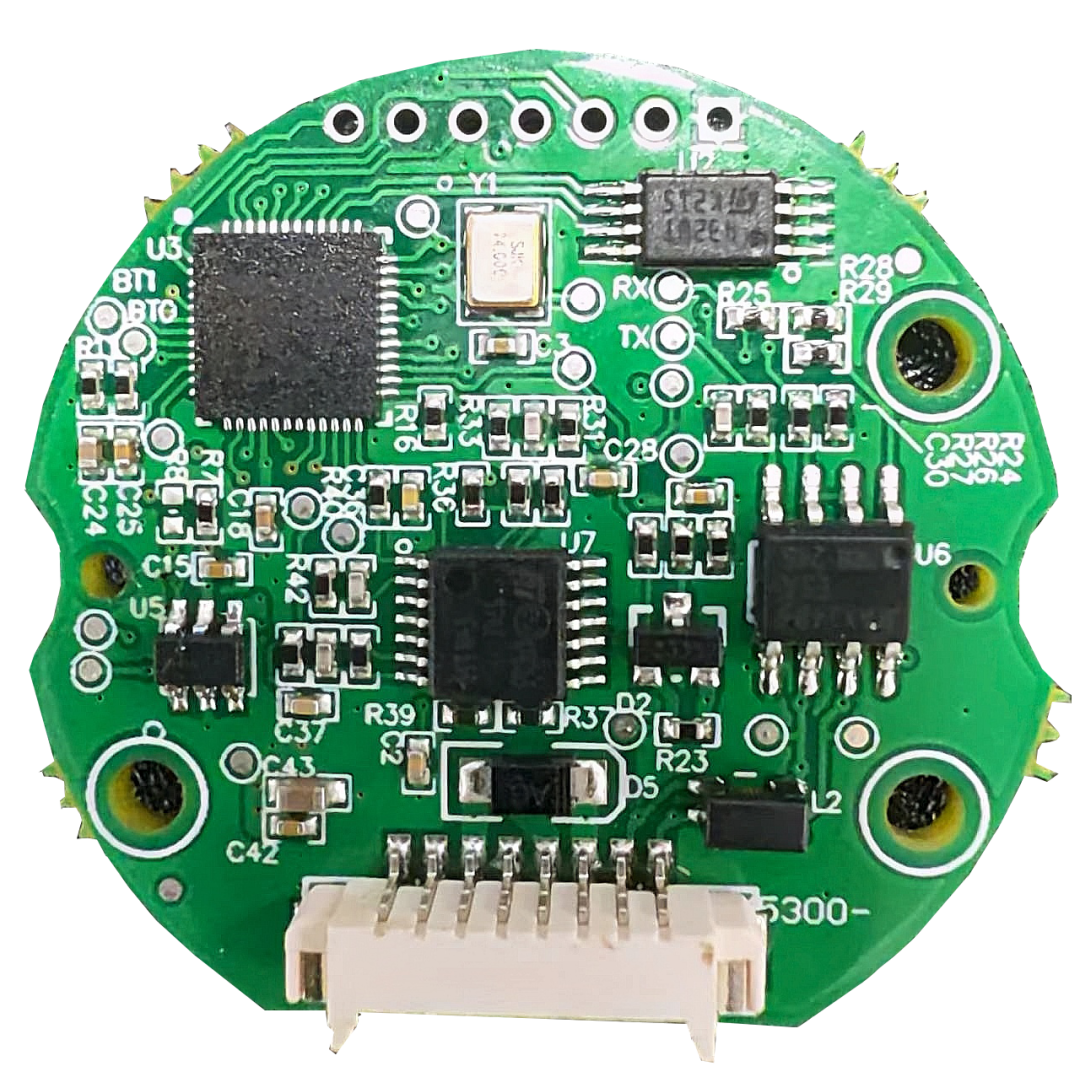
主控芯片:先楫HPM5300系列
方案特点:
分辨率:17b
支持最高转速:6000RPM
支持增益偏差校正
支持温漂补偿
支持掉电多圈保存
支持Offset校正
先楫优势:
高算力:480MHz
2 X 16b ADC
输出协议丰富
片内可编程运放,支持差分输入
低功耗:1.5uA
小封装:QFN 48
应用场景:伺服驱动器、机器人等
旋变硬/软解码方案
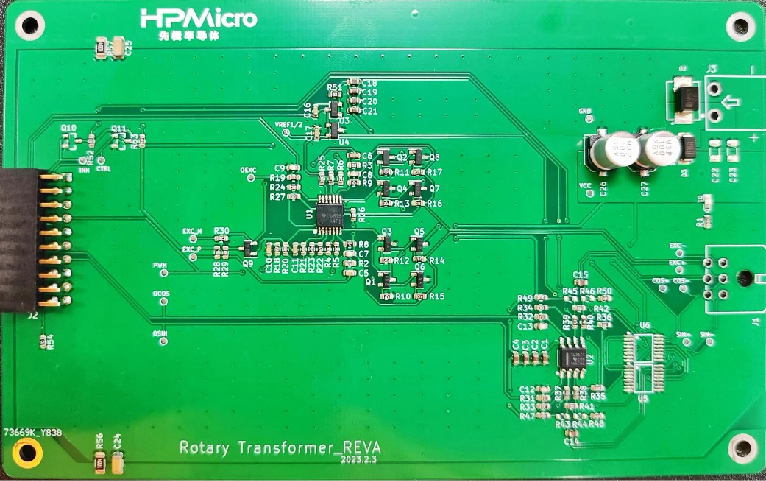
主控芯片:先楫HPM5300和和HPM6000系列
方案特点:
硬解码:RDC硬件支持快速的旋变解码
软解码:成熟方案,使用HPM5000~6000
16b ADC带来更好的解码性能
高算力、高主频带来解码低延时
丰富的编码器接口和协议,可以统一编码器平台,如磁编、光编和旋变等
先楫优势:HPM5300系列可结合QEO和SEI,可以支持多种方式输出,如Tamagawa、EnData、正交脉冲等。
应用场景:工况或环境恶劣的电机驱动,如
新能源车:电机驱动
CNC机床、磨床等
单芯片4轴驱显一体伺服方案
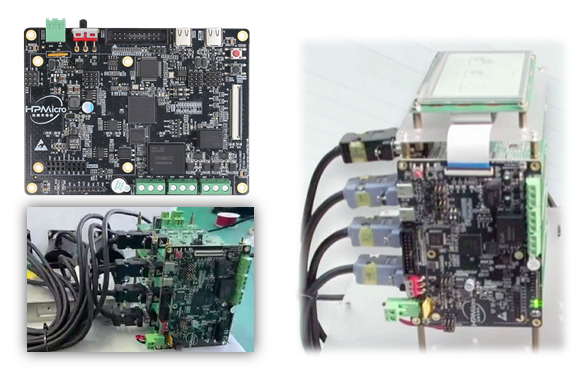
主控芯片:先楫HPM6000系列
方案简介:四轴伺服解决方案采用高性能的 HPM6750 作为主控,单芯片实现 HMI 与四轴伺服运动控制,稳定性好、响应速度快、控制精度高,无需总线通信反馈与交互控制,片内完成所有数据采集、处理和显示,对伺服控制和四电机的同步控制效率大大提高。
方案特点:
816MHz 主频控制器,性能强悍
多伺服电机控制,高精度位置控制
集传感器数据采集、显示、交互、多电机控制于一体
相比模块化的伺服控制系统,方案性能和效率大大提高
应用场景:多轴协同场景,如
机器人:工业机器人、SCARA机器人
机床加工、伺服方案
申请样片,方案技术资料,请扫二维码。

(*资料源自先楫半导体,点击阅读原文,查看原文内容)
